
自适应滤波器原理
自适应滤波器
1.维纳推导
- 输入信号X(n) 输出信号Y(n) 误差信号e(n)
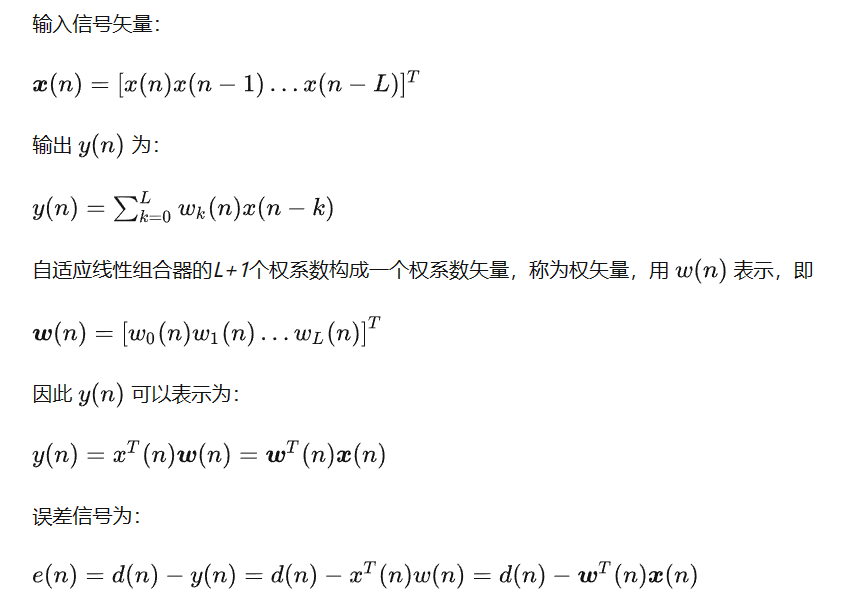
- 误差信号均方值最小的准则

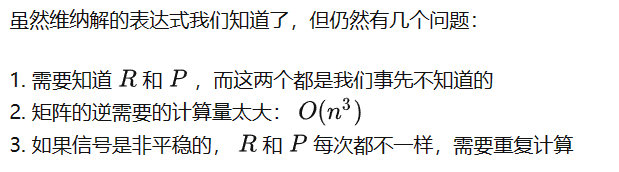
- 缺点:Rxx和Rxd需要计算且计算量大,如果信号非平稳还需重复计算
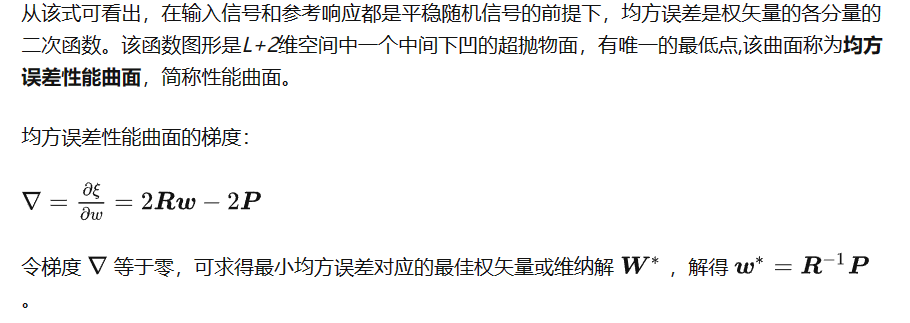
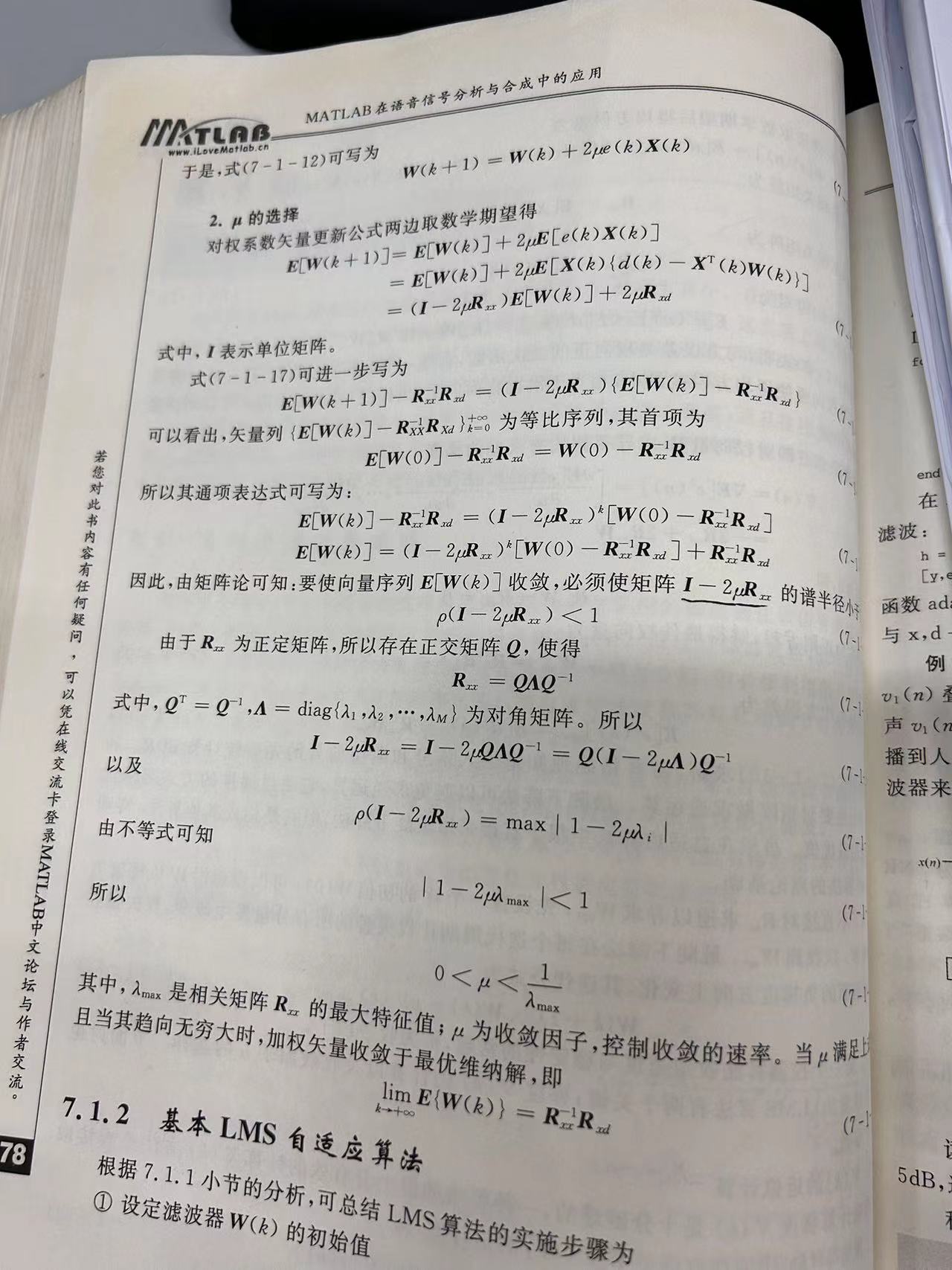
2.梯度下降法
以MSE为指标,因为滤波器系数滤波器系数的二次函数,因此该函数具有唯一的最小值。一般是采用梯度下降的方法来进行迭代搜索出最小值,一般都只能逼近维纳解,并不等同于维纳解。
梯度求解:

迭代公式:
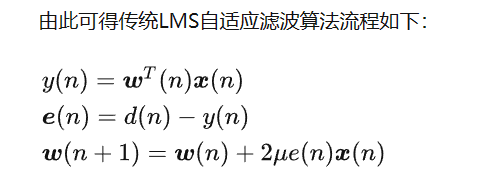
步长因子μ推导:

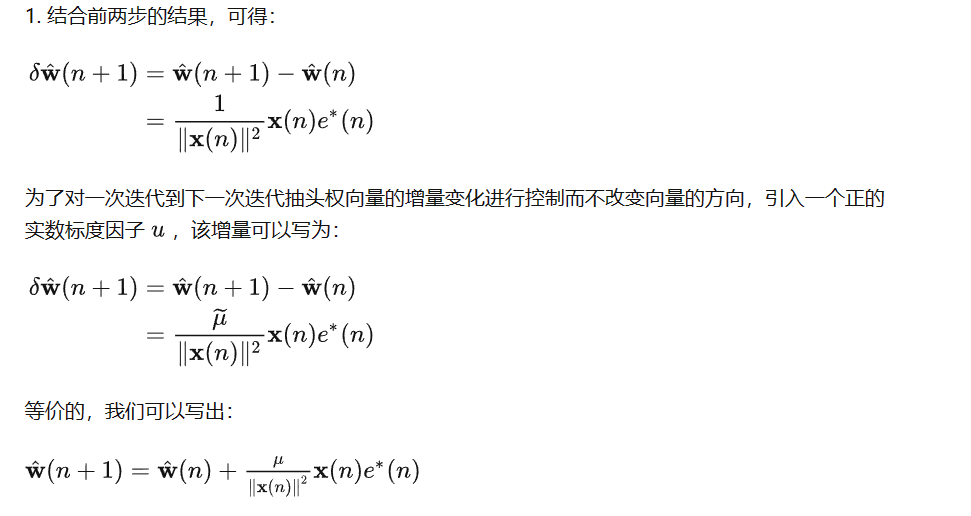
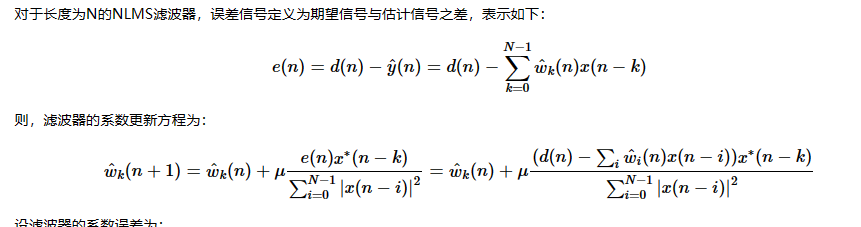
3.NLMS推导
LMS的缺点:
w(n)的增量:
受制于以下的约束条件:

拉格朗日乘子法,代价函数为:
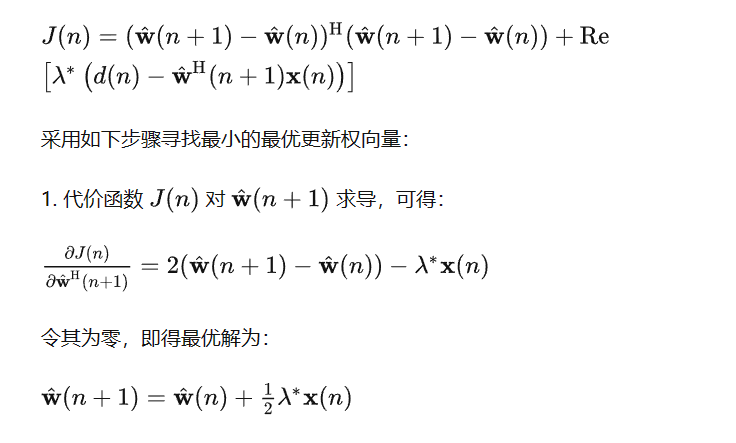
对代价函数求导,得到最优解:
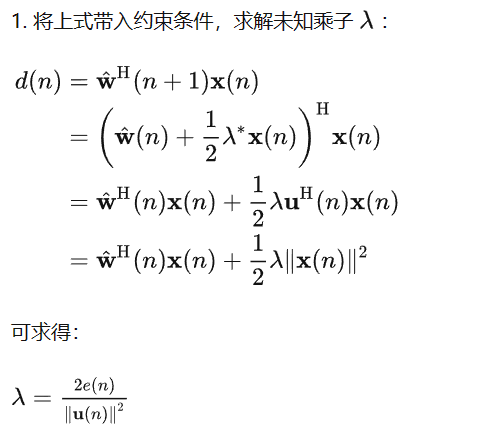
代入约束条件,求解λ:
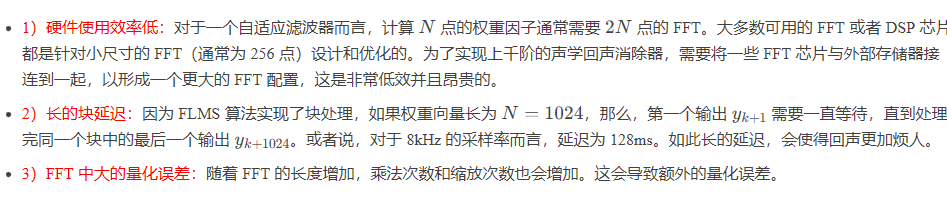
4.MDF滤波器推导
- 现有的缺点
- 分块自适应滤波器
按块更新参数不用按点更新提升运算速度
- 最优步长等于残余回声方差与误差信号方差之比
误差信号e(n)和滤波器系数w的更新方程:
滤波器的系数误差
All articles in this blog are licensed under CC BY-NC-SA 4.0 unless stating additionally.